Wetterstation
Faszination Wetter

Morgendämmerung, 10. Oktober 2011, Monschau-Mützenich
Wetter ist schön oder schlecht, zu kalt oder zu warm, aber selten langweilig, häufig einfach schlichtweg faszinierend und leider auch manchmal bedrohlich.
Anfang der 1980er-Jahre wurde mein Interesse auf die Möglichkeit gelenkt, auch als Amateur Bilder von Wettersatelliten zu empfangen. Damals umkreisten TIROS-N, die ersten NOAA- und METEOR-Satelliten auf einer erdnahen Umlaufbahn die Erde und es gab den geostationären METEOSAT. Rudy Tellert (DC 3 NT)(*) veröffentlichte 1979 in den (VHF Communications, Zeitschrift für den VHF-UHF-Amateur) eine Empfangsanlage für METEOSAT, die die empfangenen Bilder auf einer selbstgebauten Fax-Maschine ausgab.
Der Bau einer solchen Empfangsanlage mit 1.1m Parabolspiegel und viel benötigtem mechanischem Geschick lag damals außerhalb zeitlicher und finanzieller Möglichkeiten. Es blieb also erst einmal bei einem Wunsch. Trotzdem: Ebenfalls 1979 veröffentlichte Wolfgang Kurz (DK 2 RY) einen Mikrocomputer auf Basis des Z80-Prozessors für den Amateurfunk, einschließlich einer Speicherplatine, so dass insgesamt 64kByte addressiert werden konnten. Schon durchaus interessant für einen möglichen Bildspeicher. RAM-Bausteine waren damals sündhaft teuer, wenig Speicher für viel Geld. Nachfolgend gab es bis 1981 hinein Veröffentlichungen von Tellert für eine Empfangsanlage mit Bildröhre. Die Bildröhre diente dazu, einen Film zu belichten. Dazu wurde der Strahl der Bildröhre entsprechend des Fortschritts des übermittelten Bildes von einer Ablenkeinheit angesteuert, also mit 2 Zeilen pro Sekunde. Anschließend musste der Film entwickelt werden, um das Bild zu erhalten.
Der Wunsch nach einem digitalen Bildspeicher und sofortiger Bildwiedergabe auf einem Monitor wuchs. Sowohl das Projekt von Kurz als auch eigene Experimente mit einer Z80-Platine, dem in den 1980er-Jahren vom vertriebenen , zielten immer mehr auf die Planung eines RAM-Speichers, welcher doch etliche hundert Zeilen des Bildes mit einer Auflösung von 8 Bit aufnehmen sollte. Aber RAM blieb teuer und auch noch recht langsam. Grundig hatte in den 1990er-Jahren zwar einen professionellen Meteosat Receiver (MST 100) entwickelt, dieser war aber entsprechend teuer.
Der VHF-Nachsetzer von Tellert (UKW-Berichte 2/79) wurde nachgebaut (um einmal mit etwas zu beginnen) und es wurden mit einer einfachen Antenne die WFAX-Signale empfangen. Damit war zwar noch kein Bild vorhanden, aber die Idee war, den eigenen unlängst erworbenen Apple II Computer hierfür zu benutzen. Das WFAX-Signal (nach der AM-Demodulation) wurde einem A/D-Wandler zugeführt, die erzeugten 8-Bit Daten wurden mit dem Apple II eingelesen. Die Präsentation des Bildes auf dem Monitor wäre damit möglich gewesen, jedoch war die Graphik beschränkt auf "schwarz" und "weiß", also keine Graustufen. Graustufen näherungsweise zu erzeugen ist jedoch mit einer alten Drucktechnik möglich, wie sie auch beim Zeitungsdruck verwendet wurde. Mittels einer 3 x 3 Matrix können beispielsweise Nadeldrucker näherungsweise 10 Graustufen erzeugen. (Für dieses Halbton-Verfahren siehe z.B. oder für die Methoden der digitalen Halbton-Technik.)
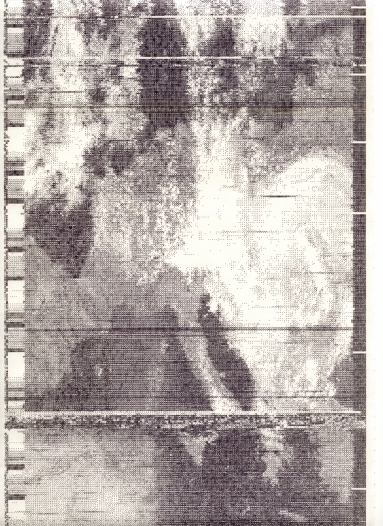 |
 |
| Aus dem Papierarchiv vom 2. August 1991 | Aus dem Digitalarchiv vom 14. April 2018 |
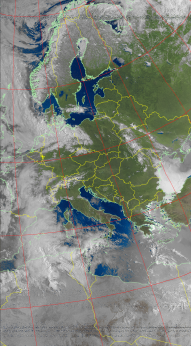
Waren Tellert und Kurz Wegbereiter für den Empfang mit Amateurmitteln, so publizierte Matjaž Vidmar (YU 3 UMV) 1982 ebenfalls in den UKW Berichten den lang ersehnten digitalen Speicher mit RAM Bausteinen. Für den damaligen Meteosat ausreichend: 256 x 256 x 6 Bit, für größere Bilder von polar umlaufenden Satelliten jedoch zu klein. Erst längere Zeit später wurde nach diesen Anfangserfolgen und der Möglichkeit der Verwendung von PCs für die Verarbeitung der empfangenen Bilder, (sprich der WFAX-"Töne") der Wettersatellitenempfang auch ohne "Bastelaktivitäten" wieder interessant. Programme wie von Patrick Tast und die Programmsammlung von haben sehr zur Vereinfachung beigetragen, ebenso von Craig Anderson. Letzteres Paket kommt mit seiner Linux-Distribution hier zur Anwendung. Für mehr Softwareinformationen siehe .
 © Wraase electronic |
Die Wettersatellitenbilder, derzeit von NOAA-18 und NOAA-19, werden mit einem APT-06 Empfänger von
empfangen, der den Eigenbau abgelöst hat. Als Antenne wurde zunächst eine
WSP-137 von RF-Systems verwendet, die vor einigen Jahren von einer KX-137, ebenfalls von Wraase, abgelöst wurde. WxToImage läuft
auf einem Raspberry Pi 2 im vollautomatischen Modus. Die empfangenen und decodierten Bilddaten werden
publiziert. NOAA-19 ist der jüngste, aber zugleich auch der letzte in das All geschossene polar umlaufende Wettersatellit, der im APT-Format sendet. Weitere sind nicht geplant; der Service sollte schon 2021 eingestellt werden, ist aber noch weiterhin verfügbar, denn auch NOAA-15 ist - mit leichten Einschränkungen - noch stets operationell. Und wenn die heutigen noch (teilweise) aktiven Satelliten ihr Lebensende erreicht haben, werden diese analogen Amateuraktivitäten leider Geschichte sein. (Vergl. Statusinformationen über diese Satelliten bei der Organisation.) Digitale Services haben sich inzwischen etabliert, und hier sind für den Amateur hinreichend viele Betätigungsfelder entstanden. |
Sensorübersicht
|
Die Wetterstation zur Aufzeichung der meteorologischen Daten wie Temperatur, Feuchte, Wind etc. basiert auf Komponenten
verschiedener Hersteller und hat nicht mehr viel gemein mit der Station, wie sie bis
betrieben wurde. Die ursprünglich verwendete Oregon Scientific
WMR928NX mit den Sensoren für Temperatur, Feuchte, Regen, Wind und Luftdruck sind inzwischen alle ersetzt. Aktuell sind jetzt folgende Sensoren aktiv: Die Sensoren sind für die Weiterverarbeitung der Daten an einen angeschlossen. |

Temperatur und Feuchte
 |
Davor war auch der BME280 von im Einsatz. (Siehe auch zum Thema .) Da der Sensor BME280 ein SMD-Bauteil ist, wurde ein Breakout-Board von verwendet. Das Breakout Board wurde zusätzlich mit einem Korrosionsschutz versehen. Hierzu wurde das Board beidseitig mit von Contakt Chemie besprüht und versiegelt. Selbstverständlich wurde das Luftloch im Gehäuse des BME280 bei der Versiegelung ausgespart. Beim ersten Einsatz eines solchen Boards zeigten sich jedoch nach einigen Monaten Ausfälle bei der Kommunikation über den I²C-Bus, verursacht durch Korrosion. Dieses Problem konnte mit der Versiegelung reduziert, aber nicht langfristig beseitigt werden. Zudem ist der Sensor wohl nicht für einen längeren Außeneinsatz geeignet, denn der Feuchtesensor lieferte irgendwann kontinuierlich 100% Feuchte, obwohl er gegen Spritzwasser geschützt in der Strahlungsschutzhütte montiert war. Auch der HTM2500LF zeigte Ausfälle, obwohl er mit einem grobporigen Edelstahl Sinterfilter (ZE13) von Galltec Mela ausgestattet war (siehe oben). |



Bodentemperaturen
 © Sensorshop24.de |
Die Bodentemperaturen in 5, 10, 20, 50 und 100cm Tiefe werden mittels wasserdichter 10k NTC-Fühlern gemessen. Sie befinden sich in unmittelbarer Nähe der Station, um etwaige Fehler durch die Kabel zu minimieren. |
Luftdruck
 © Watterott |
Die Messung des Luftdrucks erfolgt mit einem BME280, da dieser auch einen Luftdrucksensor mit an Bord führt.
Es werden zwei voneinander unabhängige Messungen in von Witterungseinflüssen geschützten Umgebungen durchgeführt. Die leicht unterschiedlichen Höhenlagen
der beiden Sensoren werden dabei natürlich berücksichtigt(**) . Anhand der Außentemperatur und der barometrischen Höhenformel wird jeweils der auf Meereshöhe reduzierte Luftdruck
errechnet. Unter Berücksichtigung der Höhen der zwei unterschiedlichen Montageorte ergeben sich bisher bis auf ± 0.1hPa gleiche Werte, womit man zufrieden sein kann. Somit wird nur ein Sensor als führende Größe verwendet, der zweite dient der Kontrolle. (**) Entsprechend der barometrischen Höhenformel nimmt der Luftdruck je Meter Höhe um ca. 0.12hPa ab. |
Niederschlag
 |
Der Regenmesser MR3H-01s der verrichtet seit Herbst 2018
seinen Dienst. Er hat eine Auflösung von 0.1mm Niederschlag und besitzt eine Heizung,
um auch bei niedrigen Temperaturen Graupel, Hagel oder Schnee als Regenäquivalent zeitnah messen zu können. Der Regenmesser ist kalibriert und es wird eine von Meteoservis zur Verfügung gestellte Korrekturtabelle angewendet, die die Abweichung der gemessenen Regenmenge von der tatsächlichen Regenmenge in Abhängigkeit von der Niederschlagsintensität berücksichtigt. Bei einer hohen Intensität nimmt der Fehler, der durch die Kippzeit des Kippgefäßes im Gerät entsteht, nämlich zu. Außerdem fließen geringe Mengen Wasser beim Kippvorgang nicht mehr exakt in das Kippgefäß, so dass grundsätzlich immer zu wenig gemessen wird. Die Korrekturmaßnahme berücksichtigt dies. Somit sind auch bei hohen Niederschlagsraten (z.B. bei Gewitter) sehr genaue Messungen von Niederschlagsmengen zu erwarten. Die Steuerung der Heizung erfolgt über einen Thermostaten im Gerät; übergeordnet schaltet ein Algorithmus im Raspberry Pi die Versorgungsspannung der Heizungsregelung im Bereich um den Nullpunkt der Außentemperatur, um noch etwas stromsparender operieren zu können. |
Wind
 |
Der Windmesser WGR918N war der letzte Sensor, der von der ursprünglichen Wetterstation noch übrig geblieben war. Inzwischen hat in 2019 auch
hier ein Autausch stattgefunden. Während der Übergangszeit wurden die Daten nicht mehr mittels des Solarsensors STR938 übertragen, sondern
die Daten wurden vom Sensor direkt in einem Raspberry Pi verarbeitet. Damit war auch die Empfangsstation der Oregon WMR928N
nicht mehr erforderlich. Inzwischen dient ein WGR918N nur noch der optischen Anzeige der Windrichtung. Die Messungen von Windrichtung und Windgeschwindigkeit übernimmt nun ein Ultraschall-Anemometer der . Hierzu wurde das UMB-Protokoll der Fa. Lufft im Raspberry Pi implementiert. Für die kalte Jahreszeit ist das Gerät, wie der Regenmesser, mit einer integrierten Heizung ausgerüstet. Die Umsetzung der RS485-Schnittstelle des Anemometers an den Pi übernimmt ein RS485-USB-Konverter. Die aktuellen Debian Distributionen für den Pi bringen die Treiber für z.B. einen CH340-Chip schon mit. Mehr Hintergrundwissen über Ultraschall-Anemometer und deren Selbstbau ist z.B. bei zu finden. Anmerkungen: Alle Oregon Sensoren übertragen ihre Daten im . Der Raspberry extrahiert aus den Datentelegrammen die Werte für die Windrichtung, die durchschnittliche Windgeschwindigkeit und die maximale Windgeschwindigkeit im Messintervall. Im Netz sind einige Ansätze zu finden, wie die Oregon Sensoren ihre Daten übertragen: Der Windsensor WGR918N war leider in den o.g. Dokumenten nicht aufgeführt; das Datentelegramm konnte jedoch - bis auf die Checksum - entschlüsselt werden. Die Checksum scheint bisher nur für die Sensoren der Generation V1 bekannt zu sein. Die bisher entschlüsselte Struktur des Datentelegramms des Sensors WGR918N ist zu finden. |
Schneehöhe
 |
 Die Schneehöhe wird ebenfalls mit einem Ultraschallsensor ermittelt. Nach ersten wenig erfolgreichen Versuchen wurde der Ultraschallsensor MB7374 aus der Reihe der Sensortypen von ausgewählt. Für den Ultraschallsensor von Maxbotix ist auch der NTC-Widerstand verfügbar. Dieser NTC nimmt Einfluss auf das Rechenmodell des Sensors und korrigiert die Messwerte anhand der aktuellen Temperatur, da sich die Schallgeschwindigkeit mit der Temparatur ändert und dies schon bei einem Meter Messabstand zu Fehlern führt. Jedoch ist der Widerstand, montiert auf einem Breakout-Board, wie der BME280 nicht für den dauerhaften Außeneinsatz verwendbar. Korrosion führt auch hier zu schnellen Ausfällen. Deshalb wird dem Ultraschallsensor mit einem Präzisionswiderstand eine Temperatur von 25°C vorgegaukelt und der vom Sensor produzierte Messwert wird von einem Raspberry Pi anhand der aktuellen Temperatur und der CO2-Konzentration der Luft korrigiert. Als Referenzfläche für die Messungen dient eine helle Fliese, die bei Schneefall bedeckt wird und die sich bei Sonnenlicht quasi nicht erwärmt. Anmerkung: Die Geschwindigkeit des Ultraschalls ändert sich mit der Temperatur, und zwar gilt näherungsweise: c ≈ 331.5 + (0.6 · ϑ) für -20°C < ϑ < 40°C. Mehr Informationen sowie unter Weitere Literatur und Software dazu: |
Gewitter
 © Embedded Adventures |
Das Registrieren von Entladungen bei Gewittern, also das Registrieren von Blitzen, übernimmt
ein Franklin Lightning Sensor AS3935 von der Fa.
. Für diesen Sensor
sind, wie für den BME280, diverse Breakout Boards erhältlich. Hier wird ein Board der Fa.
verwendet. Das Board ist nicht direkt bei der Wetterstation installiert, da wegen elektrischer Felder von einem nahen Weidezaun und Schaltimpulsen der Heizungen für den Regen- und den Windsensor falsche Daten entstehen würden. Er befindet sich auf dem Grundstück außerhalb der Gebäude in einer von elektromagnetischem Smog weitestgehend sauberen Umgebung. Er ist wie der BME280 an das I²C-Interface eines Raspberry Pis angeschlossen. Der Sensor liefert erstaunlich gute Resultate; das Preis-Leistungsverhältnis ist bestens. Die Qualität der Daten ist natürlich nicht zu vergleichen mit denen der Wetterdienste. Mit einem Sensor an einem Ort kann natürlich auch nicht die Richtung ermittelt werden, aus der ein Gewitter herannaht. Wer sich intensiver hiermit beschäftigen möchte sei beispielsweise auf die Aktivitäten von verwiesen. |
Datenverarbeitung
 |
Alle Sensoren sind an Raspberry Pi's angeschlossen, auf denen die benötigten Schnittstellen und Protokolle realisiert sind. In
der Außenstation ist ein Pi in einem Säulenschrank untergebracht und verrichtet dort problemlos seinen Dienst.
Benötigte Netzgeräte und die Transformatoren für die Heizungen sind ebenfalls in diesem Schrank installiert. Die Daten werden mittels einer WIFI-Schnittstelle an einen Datenbankserver übertragen. In Offlinesituationen, z.B. bei Wartungsarbeiten am Datenbankserver, schreibt der Pi die Daten in einen Logfile, von wo aus diese dann später in die Datenbank übertragen werden. |
Hinweise:
Geographische Daten der Wetterstation: lat=50.571883, lon=6.222888, h=587m.
Die Station speichert seit dem Jahr 2008 ihre Daten in eine Datenbank. Die hieraus erzeugten statistischen Daten sind unter abrufbar.
Im Zehnminutentakt werden die Daten
(*) Oben genannte Rufzeichen gültig zum Zeitpunkt der jeweiligen Publikationen.